Day2-03-IISc-RB5-qual_video_updated_final
May 7, 2024 | 9:54
Infrastructure Cameras for Robotics
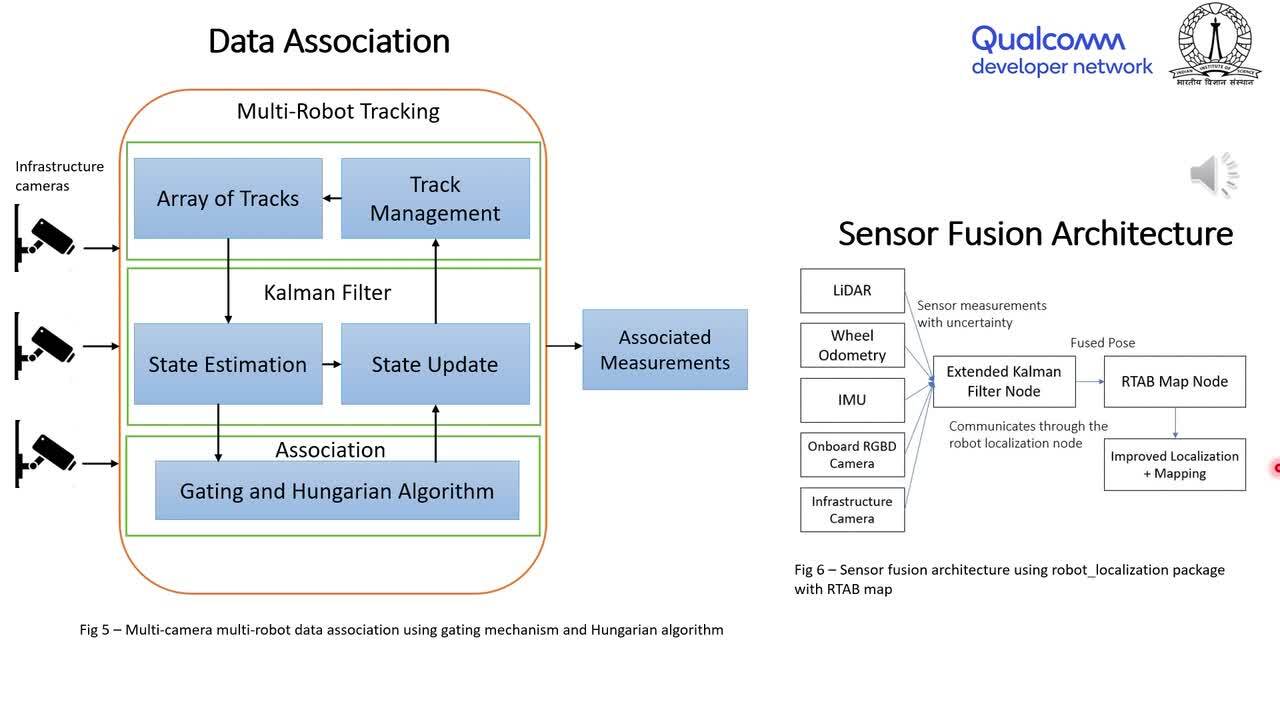
Proposing a scalable system to leverage monocular security cameras for indoor autonomous navigation of mobile robots. Assuming a high-quality communication network, like WiFi6 or 5G, interconnecting the robots with a distributed network of RB5 edge compute. On premise cameras and robots allows for minimal round-trip latency, with real-time pose inference. A marker-less robot pose estimation approach is presented along with a quantification of epistemic uncertainty, which is then fused with the robot’s local sensors to achieve high-accuracy localization. Fusing pose estimates from fixed external monocular cameras improves SLAM performance. We demonstrate collaborative perception where robots help refine each other’s poses achieving overall robustness in localization.