Computer Vision
Enriching the mobile experience.
The Computer Vision program at Qualcomm Research is focused on developing technologies to enrich the user experience on mobile devices. The project effort targets several features such as, Sensor Fusion, Augmented Reality, Computational Photography, HW Accelerators, etc. for enhanced computer vision capabilities on mobile devices in known and unknown environments.
The project team works on developing new solutions to further differentiate our products with innovative system engineering design, analysis, hardware and software prototyping, industry demonstrations, and commercialization.
As part of the effort, new algorithms are being developed in areas such as advanced image processing and robust tracking techniques aimed at real-time robust and optimal implementation of visual effects on mobile devices.
Qualcomm Research is a division of Qualcomm Technologies, Inc.
Computer Vision Features

SLAM
SLAM
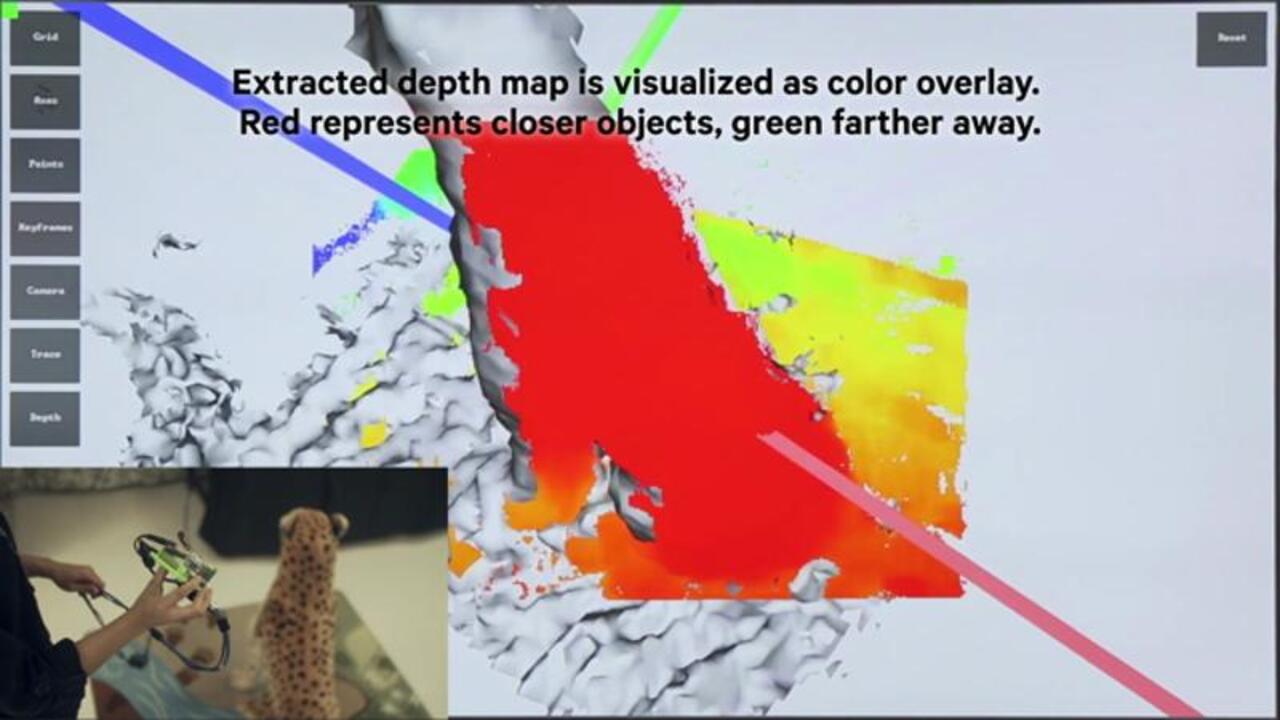
Provides a real-time, robust implementation of Simultaneous Location And Mapping (SLAM) on mobile devices that maps and tracks based on natural features, solely using the built-in camera of the device.

3D Object Detection
3D Object Detection
Enables real-time modeling and identification of real world 3D objects using Computer Vision and provides accurate, robust tracking techniques using multiple natural features. Target applications include Augmented Reality and Indoor Navigation.

Augmented Reality
Augmented Reality
Augmented reality entails superimposing digital content on top of a view of the real world through a camera viewfinder. AR transforms your mobile device into a magic looking glass.

Sensors
Sensors
Provide a real-time, robust implementation of visual and inertial sensor fusion on mobile devices that maps and tracks in feature-sparse environments. Target applications include Computational Photography, Indoor Navigation and Augmented Reality.

HW Accelerators
HW Accelerators
The use of configurable and programmable hardware cores designed to accelerate high-performance image and video processing applications.

Automated Testing
Automated Testing
The use of automated testing of Computer Vision algorithms using robots, variable lighting, and test video sequences, to enables precise measurement of improvements in CV algorithms.